Manuel Utilisateur
Résumé du manuel d'utilisation
La calibration
Il est important de calibrer les accéléromètres
Le GnuVario-E intégre un accéléromètre, qui doit être calibré.
D’abord sous Windows ou Mac, installez Python version 2 . Sous Windows, assurez-vous de cocher l’option add to PATH variable.
Récupérer le code calibration.zip que vous placerez dans un dossier nommé par exemple “calibrage”
Copier le fichier variocal.cfg vierge sur la carte SD
Assurez-vous que votre carte SD est à l’intérieur du variomètre.
Allumer le Gnuvario-E
Passez en mode calibration en appuyant sur le bouton droit au démarrage (au moment de l’écran d’init).
Vous avez quelques secondes pour placer le vario à plat et appuyer sur le bouton central.
Attendez les 3 bips puis commencez à faire pivoter le vario dans toutes les directions
Vous devez faire environ 5 à 6 déplacements par face en attendant le bip entre chaque déplacement
Plus vous ferez de mesures, plus la calibration sera précise
ATTENTION il est indispensable de n’oublier aucune face
A la fin, appuyer sur le bouton gauche du vario pour terminer la calibration. Le vario redémarre.
Cela va créé un fichier “RECORD**.CAL” sur la carte SD. Copiez ce fichier dans le dossier “best-fit-calibration” et renommez-le si nécessaire en tant que “RECORD00.IGC”.
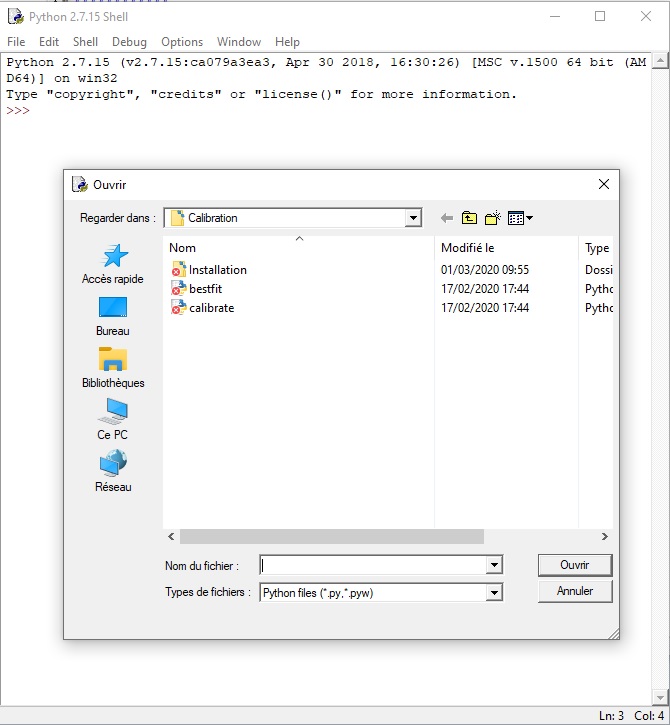
Sous Windows ou Mac, lancez l’Idle Python et ouvrez le programme “calibrage/calibrer.py”. Appuyez sur “F5” pour exécuter.
ou
c:>cd calibration
c:\calibration> python calibrate.pySous Linux, lancez simplement :
~$ cd Arduino/best-fit-calibration
~/best-fit-calibration$ python2 calibrate.pyPour terminer la calibration, copier l’ensemble des paramètres de calibration dans le fichier variocal.cfg présent sur la carte SD
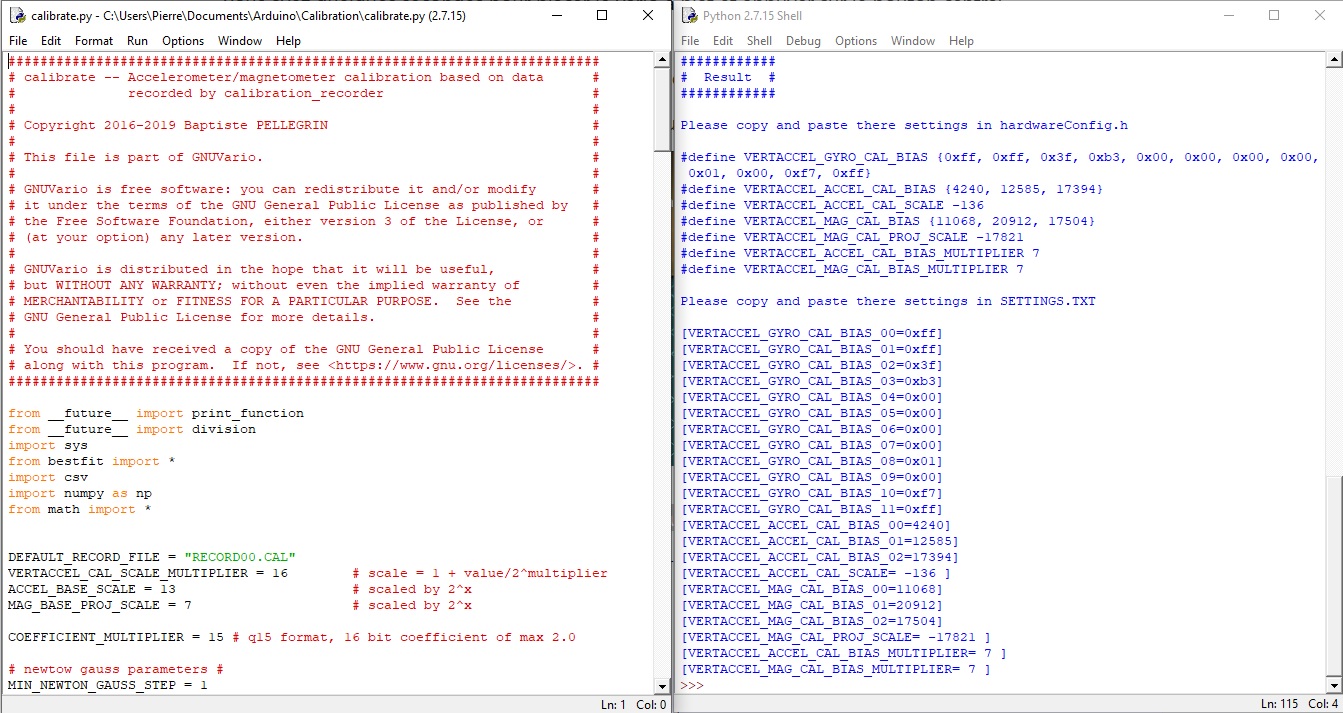
Fichier variocal.cfg
[VERSION=1.0]
/* Calibration */
[VERTACCEL_GYRO_CAL_BIAS_00=0xff]
[VERTACCEL_GYRO_CAL_BIAS_01=0xff]
[VERTACCEL_GYRO_CAL_BIAS_02=0x3f]
[VERTACCEL_GYRO_CAL_BIAS_03=0xb3]
[VERTACCEL_GYRO_CAL_BIAS_04=0x00]
[VERTACCEL_GYRO_CAL_BIAS_05=0x00]
[VERTACCEL_GYRO_CAL_BIAS_06=0x00]
[VERTACCEL_GYRO_CAL_BIAS_07=0x00]
[VERTACCEL_GYRO_CAL_BIAS_08=0x01]
[VERTACCEL_GYRO_CAL_BIAS_09=0x00]
[VERTACCEL_GYRO_CAL_BIAS_10=0xf7]
[VERTACCEL_GYRO_CAL_BIAS_11=0xff]
[VERTACCEL_ACCEL_CAL_BIAS_00=4240]
[VERTACCEL_ACCEL_CAL_BIAS_01=12585]
[VERTACCEL_ACCEL_CAL_BIAS_02=17394]
[VERTACCEL_ACCEL_CAL_SCALE= -136]
[VERTACCEL_MAG_CAL_BIAS_00=11068]
[VERTACCEL_MAG_CAL_BIAS_01=20912]
[VERTACCEL_MAG_CAL_BIAS_02=17504]
[VERTACCEL_MAG_CAL_PROJ_SCALE=-17821]
[VERTACCEL_ACCEL_CAL_BIAS_MULTIPLIER=7]
[VERTACCEL_MAG_CAL_BIAS_MULTIPLIER=7]